Sistem otomatisasi budidaya gurame
Budidaya ikan gurame merupakan salah satu sektor perikanan yang sangat potensial di Indonesia, mengingat tingginya permintaan pasar dan nilai ekonomis ikan ini. Meskipun demikian, budidaya gurame sering menghadapi berbagai tantangan seperti pengendalian kualitas air, pemberian pakan yang tepat waktu, dan pemantauan kondisi lingkungan kolam. Tantangan-tantangan ini dapat menghambat produktivitas dan efisiensi budidaya jika tidak dikelola dengan baik.
Untuk mengatasi masalah tersebut, pengembangan sistem otomatisasi budidaya gurame menjadi sangat penting. Sistem ini dirancang untuk mengotomatiskan berbagai aspek manajemen kolam ikan, mulai dari pengaturan kualitas air, kontrol ketinggian air, penerangan kolam, hingga pemberian pakan secara otomatis. Dengan menggunakan berbagai jenis sensor dan teknologi canggih, sistem otomatisasi ini dapat memantau dan mengendalikan kondisi kolam secara real-time, sehingga menciptakan lingkungan yang optimal bagi pertumbuhan dan kesehatan ikan gurame.

2. Tujuan [back]

|
Microcontroller ATmega328P |
|
Operating Voltage 5 V |
|
Input Voltage (recommended) 7 – 12 V |
|
Input Voltage (limit) 6 – 20 V |
|
Digital I/O Pins 14 (of which 6 provide PWM output) |
|
PWM Digital I/O
Pins 6 |
|
Analog Input Pins 6 |
|
DC Current per I/O
Pin 20 mA |
|
DC Current for 3.3V
Pin 50 mA |
|
Flash Memory 32
KB of which 0.5 KB used by bootloader |
|
SRAM
2 KB |
|
EEPROM 1 KB |
|
Clock Speed
16 MHz |

|
Model Number |
1222 SW1 Kotak |
|
Unit |
1pc |
|
Classification |
Super Heavy Duty |
|
Color |
Hitam |
|
Chemistry |
Zinc Carbon |
|
Battery Capacity |
400 mAh |
|
Battery Terminal Type |
Button Top |
|
Packaging Quantity |
Bulk 2 pcs |
|
Berat (Kg) |
0.1 |

·
Tegangan pengoperasian layar ini berkisar antara 4,7V
hingga 5,3V
·
Bezel layarnya berukuran 72 x 25 mm
·
Arus operasi adalah 1mA tanpa lampu latar
·
Ukuran PCB modul adalah 80L x 36W x 10H mm
·
pengontrol HD47780
·
Warna LED untuk lampu latar adalah hijau atau biru
·
Jumlah kolom – 16
·
Jumlah baris – 2
·
Jumlah pin LCD – 16
·
Karakter – 32
·
Ia bekerja dalam mode 4-bit dan 8-bit
·
Kotak piksel setiap karakter berukuran 5x8 piksel
·
Ukuran font karakter adalah 0,125 Lebar x 0,200 tinggi

Spefisikasi
·
12Volt /
2Amp switching power supply (UL)
·
Input
voltage: 100-240V AC 50/60Hz
·
Output
voltage: 12v DC 2Amp
·
Connector:
5.5mm OD, 2.1mm ID, 10mm Long
·
Cord length:
1.5m
Spesifikasi Micro Water Pump 365B-7:
· Tegangan Kerja: 12V DC, yang biasanya
dapat dihubungkan ke sumber daya seperti baterai 12V atau adaptor DC
· Desain Kecil: Memiliki desain yang kecil dan ringkas, sehingga
mudah diintegrasikan dalam proyek-proyek miniatur atau aplikasi portabel.
· Material: Umumnya terbuat dari bahan tahan korosi untuk
keamanan dan keawetan pompa.
· Kinerja: Meskipun ukurannya kecil, pompa ini dapat
memberikan aliran air yang cukup untuk aplikasi kecil hingga menengah.
· Kabel dan Konektor: Dilengkapi dengan kabel dan konektor untuk memudahkan penghubungan ke sumber daya atau kontroler

Spesifikasi


- Ultrasonic Sensor
- pH Sensor
- Rain Sensor
- Infrared Sensor
- LDR Sensor (Light Dependent
Resistor)
- LED (merah)
- IC PCF8574
- Resistor 220 Ω
- Resistor 1000 Ω
- Jumper Cable
- Breadboard

|
Operating Voltage |
DC 5V |
|
Operating Cuurent Standby |
<2 mA |
|
Operating Current |
15 mA |
|
Operating Frequency |
40 KHz |
|
Maximum Range |
400 cm (4 m) |
|
Minimun Range |
2 cm |
|
Ranging Accuracy |
3mm |
|
Measuring Angel |
15 degree |
|
Trigger Input Signal |
10 mikroSecond TTL pulse |
|
Dimension |
45 x 20 x 15 mm |

PH Probe Sensor
Pinout
TO – Temperature
output
DO – 3.3V pH limit
trigger
PO – PH analog
output
Gnd – Gnd for PH
probe
Gnd – Gnd for board
VCC – 5V DC
POT 1 – Analog
reading offset (Nearest to BNC connector)
POT 2 – PH limit setting

· Modul sensor ini menggunakan bahan dua sisi
berkualitas baik.
· Anti-konduktivitas & oksidasi dengan penggunaan
jangka panjang
· Luas sensor ini berukuran 5cm x 4cm dan dapat dibuat
dengan pelat nikel di bagian sampingnya
· Sensitivitasnya dapat diatur dengan potensiometer
· Tegangan yang dibutuhkan adalah 5V
· Ukuran PCB kecil adalah 3,2cm x 1,4cm
· Untuk memudahkan pemasangan, menggunakan lubang baut
· Ia menggunakan komparator LM393 dengan tegangan
lebar
· Output dari komparator adalah bentuk gelombang bersih dan kapasitas penggerak di atas 15mA

|
Nama |
Sensor Infrared Proximity |
|
Tipe |
Module Sensor |
|
Banyak Pin |
3 Pin |
|
Tegangan Masukan |
3-5 Volt |
|
Konsumsi Arus |
23 mA saat 3.0V dan 43 mA saat 5.0V |
|
Jarak pembacaan |
2 - 30 cm (diatur dengan potensiometer) |
|
Keluaran Sensor |
Digital LOW |
|
Lampu LED indikator |
Ada |

·
Supply
: 3.3 V – 5 V (arduino available)
·
Output Type: Digital Output (0 and 1)
·
Inverse
output
·
Include
IC LM393 voltage comparator
·
Sensitivitasnya
dapat diatur
·
Dimensi
PCB size: 3.2 cm x 1.4 cm
· Input Voltage: DC 3.3V - 5V
· Output: Digital - Sensitivitas bisa diatur, dan analog
· Ukuran PCB : 33 mm x 15 mm

- Infra merah : 1,6 V
- Merah : 1,8 V – 2,1 V
- Oranye : 2,2 V
- Kuning : 2,4 V
- Hijau : 2,6 V
- Biru : 3,0 V – 3,5 V
- Putih : 3,0 – 3,6 V
- Ultraviolet : 3,5 V




- Infra merah : 1,6 V
- Merah : 1,8 V – 2,1 V
- Oranye : 2,2 V
- Kuning : 2,4 V
- Hijau : 2,6 V
- Biru : 3,0 V – 3,5 V
- Putih : 3,0 – 3,6 V
- Ultraviolet : 3,5 V

· Length:
20cm
· Male
to female socket, male to male, and female to female
· 5
different colors:
o
Red
o
Yellow
o
Green
o
White
o
Black
· Jumpers
are made from 26 AWG wires
· Material: Plastic

Spesifikasi :
- Trigger Voltage (Voltage across coil) : 5V DC
- Trigger Current (Nominal current) : 70mA
- Maximum AC load current: 10A @ 250/125V AC
- Maximum DC load current: 10A @ 30/28V DC
- Compact 5-pin configuration with plastic moulding
- Operating time: 10msec Release time: 5msec
- Maximum switching: 300 operating/minute (mechanically)
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi.
Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).

Gambar 1. Duty Cycle
· Duty
Cycle = tON / ttotal
· tON
= Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high
atau 1)
· tOFF
= Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low
atau 0)
· ttotal
= Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga
dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang memiliki simbol tilde (~) seperti pin 3, 5, 6, 9, 10, dan 11 dapat digunakan untuk PWM. Pin-pin ini juga dapat difungsikan sebagai input atau output analog. Untuk mengatur PWM pada pin tersebut, gunakan perintah analogWrite().
PWM pada Arduino bekerja dengan frekuensi 500Hz, yang berarti ada 500 siklus per detik. Setiap siklus dapat diberi nilai antara 0 hingga 255. Nilai 0 berarti pin tersebut akan tetap 0 volt sepanjang siklus, sedangkan nilai 255 membuat pin selalu 5 volt selama siklus. Misalnya, nilai 127 (sekitar 50% dari 255) akan membuat pin 5 volt untuk setengah siklus dan 0 volt untuk setengah siklus berikutnya. Jika nilai adalah 64 (sekitar 25% dari 255), maka pin akan 5 volt selama 1/4 siklus dan 0 volt selama 3/4 siklus, dan ini diulang 500 kali dalam 1 detik.

Gambar 2. Siklus Sinyal PWM pada Arduino
ADC (Analog Digital Converter)
ADC atau Analog to Digital Converter adalah komponen elektronik yang berfungsi sebagai penghubung antara sinyal analog dan sistem digital. Tugas utama ADC adalah mengubah sinyal analog yang masuk menjadi kode-kode digital yang dapat diproses lebih lanjut oleh sistem digital. Ada dua aspek penting dalam operasional ADC, yaitu kecepatan sampling dan resolusi.
Kecepatan sampling mengindikasikan seberapa sering ADC dapat mengambil dan mengonversi sinyal analog ke dalam bentuk digital dalam satu periode waktu tertentu, umumnya diukur dalam sample per second (SPS). Resolusi mengukur tingkat detail atau ketelitian konversi ADC dalam menghasilkan nilai digital. Pada Arduino, resolusi yang umumnya digunakan adalah 10 bit, yang berarti rentang nilai digital yang dihasilkan adalah dari 0 hingga 1023.
Arduino menggunakan tegangan referensi 5 volt untuk ADC-nya, sehingga ADC mampu menangani sinyal analog dengan rentang tegangan dari 0 hingga 5 volt. Pada board Arduino seperti Arduino Uno, pin analog input ditandai dengan kode A (misalnya A0 sampai A5). Untuk membaca data dari sinyal input analog pada Arduino, digunakan fungsi analogRead(pin);
INTERUPT
Interupsi adalah proses dalam sistem mikrokontroler yang menghentikan
prosea program utama akibat terjadinya pemicu tertentu dari suatu sumber
interupsi dan memaksa sistem mikrokontroler untuk mengeksekusi blok program
layanan interupsi. Bila terjadi interupsi, mikroprosesor akan menghentikan
dahulu apa yang sedang dikerjakannya dan mengerjakan permintaan khusus
tersebut.
Microcontroller Arduino Uno
Arduino Uno adalah salah satu papan mikrokontroller
yang paling populer dan banyak digunakan dalam komunitas elektronika dan
pemrograman. Dikembangkan berdasarkan platform open-source, Arduino Uno
dirancang untuk memudahkan pengembangan berbagai proyek elektronika. Berikut
merupakan gambar konfigurasi pin beserta penjelasan Arduino Uno :

1) 1. Power USB: Fungsi dari port USB pada modul Arduino mencakup tiga hal utama: sebagai sumber daya untuk menyediakan tegangan listrik ke Arduino, sebagai jalan untuk memasukkan program dari komputer ke Arduino, dan sebagai media untuk komunikasi serial antara Arduino dengan komputer atau sebaliknya.
2. Crystal Oscillator: Crystal oscillator berfungsi sebagai komponen utama yang menghasilkan dan mengirimkan sinyal detak ke mikrokontroler Arduino, memungkinkannya untuk beroperasi dengan tepat dan sinkron setiap siklusnya.
3. Voltage Regulator: Komponen ini bertugas untuk menstabilkan tegangan listrik yang masuk ke Arduino, sehingga Arduino dapat bekerja secara stabil meskipun tegangan masukan berfluktuasi.
4. Power Jack: Power jack pada modul Arduino berperan sebagai alternatif lain selain USB untuk menyediakan tegangan listrik ke Arduino, jika pengguna tidak ingin menggunakan kabel USB.
5. Pin Reset: Pin reset berfungsi untuk mengatur ulang Arduino, memulai program dari awal. Proses penggunaannya melibatkan menghubungkan pin reset ini langsung ke ground.
6. Pin Tegangan 3,3 Volt: Pin ini berfungsi sebagai sumber tegangan positif 3,3 volt untuk komponen yang membutuhkan tegangan operasional pada tingkat tersebut.
7. Pin Tegangan 5 Volt: Sebagai sumber tegangan positif 5 volt, pin ini umumnya disebut juga sebagai pin VCC, digunakan untuk memberikan daya kepada komponen yang memerlukan tegangan 5 volt.
8. Pin Ground (GND): Fungsi dari pin GND adalah sebagai koneksi negatif pada setiap komponen yang terhubung ke Arduino, memastikan bahwa tegangan dapat mengalir dengan baik dalam sirkuit.
9. Pin Penambah Tegangan (VIN): Pin ini berfungsi sebagai pintu masuk tambahan untuk suplai daya eksternal sebesar 5 volt ke Arduino, alternatif lain selain menggunakan USB atau power jack.
10. Pin Analog: Pin ini berfungsi untuk membaca tegangan atau sinyal analog dari berbagai jenis sensor dan mengonversinya menjadi nilai digital yang dapat diproses oleh mikrokontroler Arduino.
11. Main Microcontroller: Mikrokontroler utama di Arduino berperan sebagai pusat pengendalian yang mengatur operasi semua pin-pinnnya.
12. Tombol Reset: Komponen ini berfungsi sebagai mekanisme tambahan untuk mengulang program dari awal dengan menekan tombol secara fisik.
13. Pin ICSP (In-Circuit Serial Programming): Pin ini digunakan untuk memprogram mikrokontroler seperti Atmega328 secara langsung melalui jalur USB yang disediakan oleh mikrokontroler Atmega16U2.
14. Lampu Indikator Power: Lampu ini berfungsi sebagai penanda visual bahwa Arduino telah menerima suplai tegangan listrik yang cukup untuk beroperasi.
15. Lampu TX (Transmit): Lampu ini memberi indikasi bahwa Arduino sedang mengirim data dalam proses komunikasi serial.
16. Lampu RX (Receive): Lampu ini memberi indikasi bahwa Arduino sedang menerima data dalam proses komunikasi serial.
17. Pin Input/Output Digital: Pin ini berfungsi untuk membaca nilai logika 1 atau 0 dari perangkat eksternal atau mengendalikan komponen output seperti LED atau relay. Pin ini termasuk yang paling sering digunakan dalam pembuatan rangkaian.
18. Pin AREF (Analog Reference): Pin ini memungkinkan pengguna untuk mengatur tegangan referensi eksternal yang digunakan dalam pengukuran analog pada Arduino Uno, biasanya dalam rentang 0 hingga 5 volt.
19. Pin SDA (Serial Data): Pin ini berfungsi sebagai saluran untuk mengirim data serial antara Arduino dengan modul I2C atau perangkat serupa.
20. Pin SCL (Serial Clock): Pin ini mengirimkan sinyal clock yang digunakan untuk sinkronisasi komunikasi serial antara Arduino dengan modul I2C atau sejenisnya.
KOMUNIKASI ARDUINO
1 1) Universal
Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter)
adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit
paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang
digunakan untuk komunikasi serial pada komputer atau port serial perangkat
periperal.

Data dikirimkan secara paralel dari data bus ke UART1.
Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat
dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke
Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di
transfer secara parallel ke data bus penerima.
2 2) Serial
Peripheral Interface (SPI)
Serial Peripheral Interface (SPI) merupakan salah satu
mode komunikasi serial synchrounous kecepatan tinggi yang dimiliki oleh ATmega
328. Komunikasi SPI membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui
komunikasi ini data dapat saling dikirimkan baik antara mikrokontroller maupun
antara mikrokontroller dengan peripheral lain di luar mikrokontroler.
· MOSI
: Master Output Slave Input Artinya jika dikonfigurasi sebagai master maka pin
MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI
sebagai input.
· MISO
: Master Input Slave Output Artinya jika dikonfigurasi sebagai master maka pin
MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO
sebagai output.
· SCLK
: Clock Jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output
tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
· SS/CS
: Slave Select/ Chip Select adalah jalur master memilih slave mana yang akan
dikirimkan data.
Cara
Kerja Komunikasi SPI :

Sinyal clock dialirkan dari master ke slave yang
berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan
dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke
slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer
data ke master melalui MISO
3 3) Inter
Integrated Circuit (I2C)
Inter Integrated Circuit atau sering disebut I2C
adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain
khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL
(Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C
dengan pengontrolnya.
Cara Kerja Komunikasi I2C :

Pada I2C, data ditransfer dalam bentuk message yang
terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1,
Data Frame 2, dan kondisi Stop.
· Kondisi
start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.
· Kondisi
stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL.
· R/W
bit berfungsi untuk menentukan apakah master mengirim data ke slave atau
meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta
data dari slave)
· ACK/NACK
bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah
diterima receiver.
INFARARED SENSOR
Sensor IR
adalah perangkat elektronik yang mendeteksi radiasi IR yang menimpanya. Sensor
jarak(digunakan pada ponsel layar sentuh dan robot penghindar tepi), sensor
kontras (digunakan pada robot yang mengikuti garis), dan penghitung/sensor
penghalang (digunakan untuk menghitung barang dan alarm pencuri) adalah
beberapa aplikasi yang melibatkan sensor IR.
Cara
Kerja Infrared Sensor

Prinsip dasar dari sensor inframerah yang digunakan untuk mendeteksi benda adalah dengan cara mengirimkan sinyal inframerah menggunakan IR transmitter, kemudian sinyal tersebut dipantulkan oleh permukaan benda yang kemudian diterima oleh IR receiver.
Penggunaan warna hitam dan putih pada IR transmitter dan IR receiver adalah standar umum di mana warna hitam menyerap atau menangkap radiasi inframerah, sementara warna putih memantulkan sebagian besar radiasi inframerah yang jatuh di atasnya. Berdasarkan konsep ini, kedua LED IR (transmitter) dan fotodioda (receiver) ditempatkan berdekatan. Ketika IR transmitter memancarkan radiasi inframerah, radiasi tersebut harus dipantulkan kembali ke fotodioda setelah memantul dari objek yang dikenai. Permukaan objek dapat diklasifikasikan menjadi reflektif dan non-reflektif. Jika objek memiliki permukaan reflektif seperti warna putih atau cerah lainnya, sebagian besar radiasi inframerah akan dipantulkan kembali ke fotodioda. Berdasarkan intensitas radiasi inframerah yang dipantulkan, arus akan mengalir melalui fotodioda.
Namun, jika objek memiliki permukaan non-reflektif seperti warna hitam atau gelap, objek tersebut akan menyerap hampir seluruh radiasi inframerah yang dipancarkan oleh IR LED. Karena tidak ada radiasi yang dipantulkan, fotodioda tidak menerima radiasi yang cukup untuk menghasilkan arus. Dalam kondisi ini, fotodioda tetap memiliki hambatan yang tinggi, dan tidak ada arus yang mengalir melaluinya, mirip dengan kondisi di mana tidak ada objek yang terdeteksi.
Konfigurasi Pin

Pin konfigurasi dari penerima inframerah atau IR receiver tipe TSOP meliputi output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor ini, yang dikenal sebagai TSOP (TEMIC Semiconductors Optoelectronics Photomodules), memiliki fitur-fitur utama seperti fotodiode dan penguat yang terintegrasi dalam satu chip. Selain itu, sensor ini memiliki keluaran yang aktif rendah, konsumsi daya yang rendah, dan kompatibilitas dengan logika TTL dan CMOS.
TSOP, sebagai detector atau penerima inframerah, telah dipasangi filter frekuensi 30-56 kHz. Filter ini memungkinkan sensor untuk secara langsung mengubah sinyal frekuensi yang diterima menjadi logika 0 dan 1. Ketika TSOP menerima frekuensi pembawa (carrier), keluaran pinnya akan berada pada logika 0. Sebaliknya, jika TSOP tidak mendeteksi frekuensi pembawa tersebut, keluaran dari sensor inframerah TSOP akan berada pada logika 1.
Grafik Respon Infrared
Sensor

Sensor
hujan adalah salah satu jenis perangkat switching yang digunakan untuk
mendeteksi curah hujan. Cara kerjanya seperti saklar dan prinsip kerja
sensor ini adalah, setiap kali terjadi hujan maka saklar akan tertutup normal.
Modul sensor hujan mencangkup garis berlapis nikel dan bekerja berdasarkan
prinsip resistensi. Modul sensor ini memungkinkan untuk mengukur
kelembapan melalui pin keluaran analog & memberikan keluaran digital saat
ambang batas kelembapan terlampaui.
Cara
Kerja Rain Sensor :
Modul ini serupa dengan IC LM393 karena mengandung modul elektronik dan PCB. PCB digunakan di sini untuk mengumpulkan tetesan air hujan. Saat hujan jatuh di PCB, ini menciptakan jalur resistansi paralel yang diukur melalui penguat operasional. Sensor ini menggunakan teknologi resistif dan menunjukkan resistansi berdasarkan tingkat kelembapan, dengan resistansi lebih tinggi saat kering dan lebih rendah saat basah.
Sensor ini akan mengalami perubahan resistansi ketika terkena air di PCB-nya, dengan resistansi menurun seiring bertambahnya air dan sebaliknya. Modul ini juga dilengkapi dengan IC komparator yang berfungsi untuk menghasilkan sinyal logika 'on' dan 'off' berdasarkan kondisi sensor.
Konfigurasi Pin :

Konfigurasi pin sensor ini
ditunjukkan di bawah ini. Sensor ini mencakup empat pin yang meliputi berikut
ini
·
Pin1 (VCC): Ini adalah pin
5V DC
·
Pin2 (GND): ini adalah pin
GND (ground).
·
Pin3 (DO): Ini adalah pin
keluaran rendah/tinggi
· Pin4 (AO): Ini adalah pin keluaran analog
Grafik
Respon Sensor Hujan :

WATER PH SENSOR
Senso Sensor pH merupakan salah satu alat yang penting untuk mengukur pH dan biasa digunakan dalam pemantauan kualitas air. Sensor jenis ini mampu mengukur alkalinitas dan keasaman dalam air dan larutan lainnya. Jika digunakan dengan benar, sensor pH dapat menjamin keamanan dan kualitas produk dan proses yang terjadi di air limbah atau pabrik.
Cara Kerja Water pH Sensor
Sensor pH air bekerja utamanya melalui sensor probe yang terbuat dari elektroda kaca, di mana elektroda kaca ini berisi larutan HCl di ujungnya. Sensor probe ini mengukur ion H3O+ dalam larutan untuk menentukan pH dari larutan atau cairan tersebut. Elektroda sensor yang sensitif terhadap perubahan impedansi menggunakan lapisan kaca, memungkinkan sensor untuk memberikan pembacaan yang stabil dan responsif baik pada suhu tinggi maupun rendah dari larutan.
Mikrokontroler dapat membaca nilai pH dari sensor ini melalui antarmuka PH 2.0 yang tersedia pada modul sensor pH air. Sensor pH ini cocok digunakan untuk monitoring pH cairan dalam jangka waktu yang panjang, karena mampu memberikan pembacaan yang akurat dan konsisten.
Konfigurasi Pin

Grafik Respon Sensor

ULTRASONIC SENSOR
Sensor ultrasonik merupakan sensor yang menggunakan
gelombang ultrasonik. Gelombang ultrasonik yaitu gelombang yang umum digunakan
untuk mendeteksi keberadaan suatu benda dengan memperkirakan jarak antara
sensor dan benda tersebut. Sensor ini berfungsi untuk mengubah besaran fisis
(bunyi) menjadi besaran listrik begitu pula sebaliknya.

Sensor ultrasonik HC-SR04 adalah sensor yang telah dirancang siap pakai untuk fungsi sebagai pengirim, penerima, dan pengontrol gelombang ultrasonik. Sensor ini dapat digunakan untuk mengukur jarak antara objek dan sensor dalam rentang 2 cm hingga 4 m dengan akurasi hingga 3 mm. Sensor ultrasonik ini terdiri dari empat pin utama: Vcc untuk sumber daya positif, Gnd untuk ground, Trigger untuk memulai pengiriman sinyal ultrasonik, dan Echo untuk menangkap sinyal pantulan dari objek.
Penggunaan sensor ini dimulai dengan memberikan tegangan positif pada pin Trigger selama 10 mikrodetik, yang mengakibatkan sensor mengirimkan serangkaian sinyal ultrasonik dengan frekuensi 40 kHz sebanyak 8 kali. Sinyal ini kemudian dipantulkan oleh objek dan diterima kembali oleh sensor melalui pin Echo. Dengan mengukur selisih waktu antara saat pengiriman dan penerimaan sinyal ultrasonik, sensor ini dapat menghitung jarak ke objek yang memantulkan sinyal tersebut.
Konfigurasi Pin

Grafk HC SR-04 Ultrasonic Sensor

LDR SENSOR
Sensor Cahaya LDR (Light Dependent Resistor) adalah salah satu jenis resistor yang dapat mengalami perubahan resistansinya apabila mengalami perubahan penerimaan cahaya. Modul sensor cahaya bekerja manghasilkan output yang mendeteksi nilai intensitas cahaya. Perangkat ini sangat cocok digunakan untuk project yang berhubungan dengan cahaya seperti nyala mati lampu.
Cara Kerja
LDR (Light Dependent Resistor) digunakan dalam berbagai rangkaian elektronika untuk mengontrol aliran listrik dengan mengubah resistansi berdasarkan intensitas cahaya yang diterima. Ketika cahaya yang diterima oleh LDR semakin banyak, resistansinya akan menurun. Sebaliknya, jika cahaya yang diterima sedikit, resistansinya akan meningkat.
Konfigurasi Pin

·
VCC:
Tegangan 3.3V-5V eksternal (dapat langsung dihubungkan ke 5V MCU dan 3.3V MCU)
·
GND:
GND Eksternal
·
D0
TTL : antarmuka output papan digital kecil (0 dan 1)
·
VCC
Light : lampu indikator sensor aktif
·
D0
Output light : lampu indikator ketika ouput signal LOW/HIGH
· Potensio : menaikkan atau menurunkan sensifitas sensor
Grafik
Respon Sensor

1
Motor servo adalah jenis motor DC dengan sistem umpan
balik tertutup yang terdiri dari sebuah motor DC, serangkaian gear, rangkaian kontrol,
dan juga potensiometer. Jadi motor servo sebenarnya tak berdiri sendiri,
melainkan didukung oleh komponen-komponen lain yang berada dalam satu paket.

Berikut ini beberapa kelebihan dan kekurangan motor servo.
1. Kelebihan
Motor Servo
a. Daya yang
dihasilkan sebanding dengan berat atau ukuran motor.
b. Penggunaan
arus listrik sebanding dengan beban.
c. Tidak
bergetar saat digunakan.
d. Tidak
mengeluarkan suara berisik saat dalam kecepatan tinggi.
e. Resolusi dan
akurasi dapat diubah dengan mudah.
2. Kekurangan
Motor Servo
a. Harga relatif
lebih mahal dibanding motor DC lainnya.
b. Bentuknya
cukup besar karena satu paket.
Prinsip Kerja Motor Servo
Prinsip kerja motor servo sebenarnya mirip dengan motor DC lainnya, tetapi motor servo memiliki kemampuan untuk berputar dalam dua arah, searah maupun berlawanan arah jarum jam. Untuk mengontrol sudut putaran motor servo, pulsa yang masuk ke motor tersebut diatur.
Motor servo bekerja secara optimal ketika pin kontrolnya menerima sinyal PWM dengan frekuensi 50 Hz. Pada frekuensi ini, posisi netral motor servo tercapai saat duty cycle Ton berada pada 1,5 ms. Posisi ini menempatkan rotor motor di tengah-tengah, yang setara dengan sudut nol derajat.
Ketika Ton duty cycle kurang dari 1,5 ms, rotor motor servo akan berputar berlawanan arah jarum jam. Sebaliknya, jika Ton duty cycle lebih dari 1,5 ms, rotor akan berputar searah jarum jam. Diagram atau skema pengendalian pulsa motor servo dapat dilihat sebagai referensi untuk pemrograman atau pengaturan motor servo.

MICRO WATER PUMP 12V
Micro water pump 365B-7 adalah pompa air kecil yang beroperasi pada tegangan 12V. Ini adalah pompa air elektrik yang dirancang untuk aplikasi yang memerlukan sirkulasi atau pemompaan cairan. Berikut adalah beberapa informasi umum tentang micro water pump 365B-7.
Cara
Penggunaan
· Hubungkan Kabel: Hubungkan kabel pompa ke sumber daya 12V DC yang sesuai.
· Letakkan dalam Cairan: Tempatkan pompa dalam cairan yang ingin dipompa, seperti dalam wadah air atau proyek sirkulasi air.
· Kontrol Aliran (Opsional):
Jika diperlukan, gunakan katup atau pengatur aliran untuk mengontrol laju aliran air.
LCD (LIQUID CRYSTAL DISPLAY)
LCD atau Liquid Crystal Display adalah suatu jenis
media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk
menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau
Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar
Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter,
Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan
produk-produk elektronik lainnya.

Teknologi Display LCD ini memungkinkan produk-produk
elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi
Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan
teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD
bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan
prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar
belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya.
Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah
backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED
(Light-emitting diodes). Berikut merupakan tabel internal pin connection dari
LED:


LCD memiliki 16
pin (kaki) yaitu :
§ VSS, dihubungkan ke ground
§ VCC, dihubungkan pada tegangan sumber 5 volt, karena
LCD bekerja pada tegangan 5 volt.
§ VEE, dihubungkan ke potensiometer atau trimpot untuk
mengatur gelap terangnya layar LCD. Pin ini disambungkan ke ground jika
menginginkan layar LCD terang maksimal.
§ Register Select(RS),
dihubungkan ke mikrokontroler berfungsi mengontrol mode LCD. Jika RS diberikan
logika 0 artinya LCD disetting untuk menerima perintah. Jika RS
diberikan logika 1 artinya LCD disetting untuk menerima data.
§ Read/Write(RW),
dihubungkan ke mikrokontroler berfungsi mengontrol mode LCD. Jika RW diberikan
logika 1 mikrokontroler akan membaca data pada memori LCD. Jika RW diberikan
logika 0, mikrokontroler akan menuliskan data pada LCD. Pin RW seringkali
digroundkan untuk memberikan nilai 0, jika difungsikan sebagai display saja.
§ Enable,
dihubungkan dengan mikrokontroler sebagai toggle pengiriman data dan perintah
ke LCD
§ Pin D0 – D7, merupakan pin data, untuk mengirimkan
data yang akan ditampilkan pada LCD. Tedapat dua mode penyambungan LCD
berkaitan dengan pin ini. Mode 8 bit, menggunakan keseluruhan pin data. Mode 4
bit, menggunakan 4 pin data saja yaitu: D4, D5, D6 dan D7.
§ LED, untuk backlight. Jika diinginkan menyalakan backlight maka LED+ dihubungkan ke tegangan 5 Volt dan LED- dihubungkan ke ground.
Cara Kerja
Prinsip dasar kerja LCD melibatkan penyaluran cahaya melalui lapisan-lapisan dalam modul. Modul-modul ini dapat mengatur dan menyelaraskan diri mereka sendiri pada sudut 90 derajat, yang memungkinkan lembaran polarisasi untuk membiarkan cahaya melewatinya. Molekul-molekul dalam LCD bertugas untuk mengelola data pada setiap piksel. Tiap piksel menggunakan teknik penyerapan cahaya untuk menghasilkan gambar atau angka yang ditampilkan. Untuk menampilkan nilai atau gambar tersebut, posisi molekul dalam LCD harus disesuaikan dengan sudut cahaya.
Pengalihan cahaya ini penting untuk memastikan data yang ditampilkan dapat dilihat dengan jelas oleh mata manusia di mana pun cahaya diserap. Data ini disalurkan ke molekul dalam LCD dan akan tetap ada di sana sampai molekul tersebut diubah kembali.
BATERAI
Baterai (Battery) adalah sebuah alat yang dapat
merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat
digunakan oleh suatu perangkat Elektronik. Hampir semua perangkat elektronik
yang portabel seperti Handphone, Laptop, Senter, ataupun Remote Control
menggunakan Baterai sebagai sumber listriknya. Dengan adanya Baterai, kita
tidak perlu menyambungkan kabel listrik untuk dapat mengaktifkan perangkat
elektronik kita sehingga dapat dengan mudah dibawa kemana-mana. Dalam kehidupan
kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya
dapat dipakai sekali saja (Single Use) dan Baterai yang dapat di isi ulang
(Rechargeable).

Baterai dalam sistem PV mengalami berulang kali siklus
pengisian dan pengosongan selama umur pakainya. Siklus hidup (cycle life)
baterai adalah banyaknya pengisian dan pengosongan hingga kapasitas baterai
turun (melemah) dan tersisa 80% dari kapasitas nominalnya. Pabrik baterai
biasanya mencantumkan siklus hidup pada spesifikasi teknis baterai.
Mencantumkan satu nilai siklus hidup (cycle life) sebenarnya terlalu
menyederhanakan informasi, karena siklus hidup baterai juga tergantung pada
suhu baterai.

Dari grafik di atas, terlihat pada suhu operasional
baterai yang lebih rendah, siklus hidup baterai lebih lama. Siklus hidup
baterai juga tergantung dari DoD, artinya baterai yang dikosongkan hanya 50%
dari kapasitasnya, berumur lebih lama jika dikosongkan hingga 80%, namun
membuat sistem menjadi lebih mahal, karena membutuhkan kapasitas baterai lebih
besar untuk mengakomodasi kebutuhan yang sama.
IC PCF8574
Merupakan modul expansion board untuk mengatur hingga 8 pin I/O. menggunakan komunikasi secara I2C, artinya dengan 2 pin (SDA/SCL) maka kita dapat mengatur hingga 8 pin yg dapat dijadikan input output. modul ini juga dapat di cascade, hingga 8 modul atau hingga 64 pin input output..
Konfigurasi Pin

1. Pin 16 IC ini berupa VCC yang dapat beroperasi pada
tegangan 2.5V hingga 6V
2. Pin 8 adalah GND
3. Pin 4~7 dan 9~12 adalah pin I/O P0 hingga P7
8-Paralel (artinya Anda dapat menggunakan semua 8 pin sekaligus). Masing-masing
pin I/O dua arah ini dapat digunakan sebagai input atau output tanpa
menggunakan sinyal kontrol arah data. Saat dihidupkan, semua pin I/O ini berada
pada kondisi HIGH.
4. Pin 15 untuk input atau output data serial I2C
(Hubungkan ke VCC melalui resistor pull-up) dan
5. Pin 14 untuk input jam I2C (Hubungkan ke VCC melalui
resistor pull-up)
6. Pin 1, 2, dan 3 atau A0, A1 dan A2 memungkinkan kita
menentukan alamat kemunculan PCF8574 pada bus I2C dengan mengubahnya menjadi
TINGGI. Alamat defaultnya adalah 0x20. Secara default semua pin ini di-ground
atau LOW. Resistor pull-up tidak diperlukan untuk pin ini.
7. Pin 13 untuk Output Interupsi. Hubungkan ke VCC
menggunakan resistor pull-up.
·
IC ini memiliki Konsumsi
"Arus Siaga Rendah" yang sangat hanya 10μA.
·
SDA, SLC dan pin Interrupt
semuanya harus ditarik menggunakan resistor pull-up
·
Ada varian kedua dari IC ini
yang tersedia di pasaran yang disebut PCF8574A. Perbedaan utamanya adalah skema
pengalamatannya. Empat bit pertama dari alamat 7-bit PCF8574 adalah 0100, dan
untuk PCF8574A adalah 0111. Tiga bit terbawah adalah pengaturan pada pin
perangkat A2, A1, dan A0.
· PCF8574 dan PCF8574A memiliki arus tenggelam maksimum 25mA. Dalam aplikasi yang memerlukan drive tambahan, dua pin port dapat dihubungkan bersama untuk menyerap arus hingga 50mA.
ADAPTOR 12V 2 A DCAdaptor adalah sebuah perangkat berupa rangkaian elektronika untuk
mengubah tegangan listrik yang besar menjadi tegangan listrik lebih kecil, atau
rangkaian untuk mengubah arus bolak-balik (arus AC) menjadi arus searah (arus
DC). Adaptor / power supplay merupakan komponen inti dari peralatan elektronik.
Adaptor digunakan untuk menurunkan tegangan AC 22 Volt menjadi kecil antara 3
volt sampai 12 volt sesuai kebutuhan alat elektronika.


Relay
adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen
Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni
Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay
menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga
dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang
bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan
Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi
sebagai saklarnya) untuk menghantarkan listrik 220V 2A.

Konfigurasi
Pin
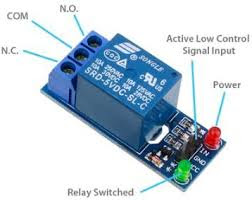
- Coil End 1
: Used to trigger(On/Off) the Relay, Normally one end is connected to 5V
and the other end to ground.
- Coil End 2
: Used to trigger(On/Off) the Relay, Normally one end is connected to 5V
and the other end to ground.
- Common
(COM) : Common is connected to one End of the Load that is to be
controlled.
- Normally
Close (NC) : The other end of the load is either connected to NO or NC. If
connected to NC the load remains connected before trigger.
- Normally
Open (NO) : The other end of the load is either connected to NO or NC. If
connected to NO the load remains disconnected before trigger.
Berikut merupakan grafik
pengukuran tegangan pada driver relay kondisi sensor aktif:

Resistor merupakan
salah satu komponen yang digunakan dalam sebuah sirkuit atau rangkaian
elektronik. Resistor berfungsi sebagai resistansi/ hambatan yang mampu mengatur
atau mengendalikan tegangan dan arus listrik rangkaian. Resistor mempunyai
nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di
antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding
lurus dengan arus yang mengalir, berdasarkan persamaan hukum Ohm :
V = I.R
R = V/R



BATERAI 9V
Baterai kotak, atau sеring disеbut batеrai 9V adalah jеnis batеrai yang umum digunakan dalam bеrbagai pеrangkat еlеktronik, tеrmasuk rеmotе control, alarm, mainan, dan instrumеn musik. Batеrai ini mеnghasilkan tеgangan 9 volt, yang mеmbuatnya idеal untuk pеrangkat yang mеmbutuhkan daya yang cukup bеsar.
Cara Kerja
Batеrai kotak 9V adalаh batеrai yang mеmiliki tеgangan konsisten sеpanjang waktunya, artinya tеgangan yang dihasilkan tidak bеrugah. Batеrai ini tеrdiri dari еnam sеl voltasе kеcil yang tеrbеrikut sеcara sеri. Tiap sеl mеnghasilkan tеgangan 1,5 volt, sеhingga total tеgangan yang dihasilkan oleh batеrai kotak 9V adalah 9 volt.
Prinsip kerja batеrai kotak 9V didasarkan pada rеaksi kimia antara logam dan еlеktrolit. Dalam batеrai alkalinе, logam yang digunakan adalah sеng, sеdangkan еlеktrolitnya tеrdiri dari campuran air dan amonium klorida. Sеdangkan dalam batеrai karbon-zinc, logam yang digunakan adalah karbon, dеngan еlеktrolit yang sama, yaitu campuran air dan amonium klorida.
Proses Pengisian: Proses pengubahan
energi listrik menjadi energi kimia
Jika baterai dihubungkan dengan beban maka, elektronnya akan mengalir ke
elektroda positif (PbO2) dengan melalui beban dari elektroda negatif (Pb),
kemudian ion-ion negatifnya akan mengalir ke elektroda positif serta ion-ion
positifnya akan mengalir ke elektroda negatif. Arus listrik juga dapat mengalir
disebabkan adanya elektron yang kemudian bergerak ke serta atau dari elektroda
sel dengan melalui reaksi ion antara molekul elektroda dengan molekul elektrolit
sehingga memberikan jalan bagi elektron untuk mengalir.
Proses Pengosongan : Proses
pengubahan energi kimia menjadi energi listrik
Proses ini merupakan proses kebalikan dari proses pengosongan dimana arus listrik dialirkan yang arahnya berlawanan dengan arus yang terjadi pada saat pengosongan. Pada proses ini, kemudian setiap molekul air akan terurai. Ion oksigen yang bebas bersatu dengan tiap atom Pb pada plat positif ini kemudian akan membentuk timah peroxida (PbO2).
Pada rangkaian Sistem Otomatisasi Budaya Gurame ini, untuk komunikasi arduino Master
dan Slave menggunakan komunikasi UART menggunakan pin Rx dan Tx untuk transfer
data, dimana pin Tx Master dihubungkan dengan Rx Slave dan Rx Master
dihubungkan dengan Tx Slave. Kemudian pin sensor sebagai inputan dihubungkan
dengan pin pada arduiono master dan output dihubungkan pada pin arduino slave
seperti yang di deklarasikan pada program.
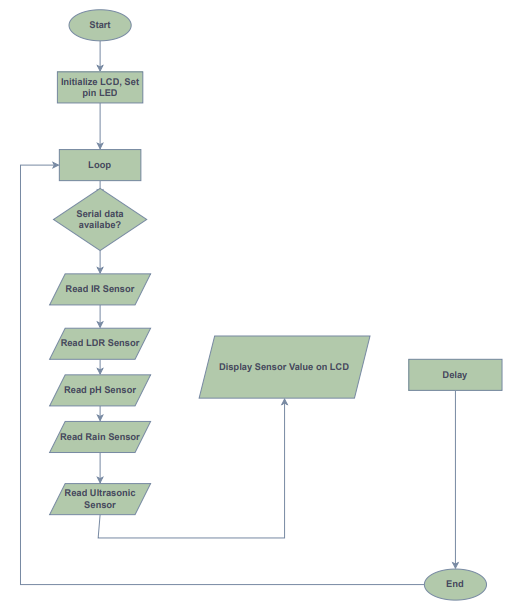
Pada Arduino Master masing-masing sensor sebagai inputan, outputnya dihubungkan pada pin yang ada pada arduino yaitu, untuk LDR Sensor dihubungkan pada pin A0 Master, pH Sensor dihubungkan pada pin A2 Master, IR Sensor dihubungkan pada pin P2 Master, Ultrasonic Sensor dihubungkan pada pin P11 trigger dan P12 Echo master, Rain sensor dihubungkan pada pin P10 master.
Pada Arduino Slave masing-masing pin dihubungkan dengan outputan sistem otomatisasi kolam gurame dan indicator lain seperti LED, motor servo, LED, Pompa dan LCD
dengan I2C. Masing-masing output pada pin digital arduino master yaitu, LED merah untuk output dari LDR Sensor. Motor servo untuk output dari sensor pH di pin P9 motor cairan asam dan pin P10 motor cairan basa master. Motor servo sebagai output dari sensor infarred terhubung sebagai motor pakan di pin 3 arduino. Lalu sensor rain juga mengalurkan output berupa motor servo yang terhubung pada pin 7 master. Sedangkan ultrasonic akan mengelurkan output berupa pompa yang tersambung pada motor drain di pin 6 arduino master. Selanjutnya LCD dengan I2C
dihubungkan dengan pin SCL dan SDA pada masing-masing pin arduino slave.
Setelah itu dilakukan perakitan dan penguploadan program pada
mikrokontroller sesuai dengan kondisi yang sudah ditentukan sebelumnya untuk
project Smar Garage System ini.
- Arduino Uno
- IR Sensor
- Rain Sensor
- pH Sensor
- Ultrasonic Sensor
- LDR Sensor
- Motor Servo
- Water Pump 12V
- LED
- LCD (Liquid Crystal Display)
- Baterai
- Relay
.jpeg)

.jpeg)


- Rangkaian Simulasi :

- Prinsip Kerja:
Sistem otomatisasi untuk budidaya gurame ini didesain untuk mengoptimalkan perawatan kolam dengan menggunakan berbagai sensor yang bekerja bersama-sama untuk memantau dan mengontrol kondisi lingkungan secara real-time. Sensor hujan berperan penting dalam mendeteksi kondisi cuaca untuk mengatur penutupan atap kolam. Ketika sensor ini mendeteksi hujan, motor servo akan menutup atap kolam secara otomatis untuk mencegah masuknya air hujan, yang membantu menjaga stabilitas kolam. Sebaliknya, saat cuaca cerah kembali dan tidak ada hujan, motor servo akan membuka atap kolam untuk memungkinkan sirkulasi udara dan sinar matahari yang diperlukan oleh ikan.
Sensor ultrasonik digunakan untuk mengukur ketinggian air dalam kolam secara terus-menerus. Jika tinggi air di bawah batas optimal (lebih dari 5 cm), pompa air akan diaktifkan untuk menambahkan air ke kolam hingga mencapai level yang diinginkan. Setelah ketinggian air kembali ke level yang ditetapkan (kurang dari 5 cm), pompa air akan dimatikan untuk menghindari pengisian berlebihan yang dapat mengganggu kondisi kolam.
Sensor cahaya (LDR) digunakan untuk mengatur pencahayaan kolam. Sensor ini mendeteksi intensitas cahaya di sekitar kolam. Ketika intensitas cahaya rendah (≤ 500), sensor akan mengaktifkan lampu LED untuk memberikan pencahayaan tambahan yang membantu aktivitas ikan, terutama di malam hari atau saat cuaca mendung. Sebaliknya, jika intensitas cahaya tinggi (> 500), LED akan dimatikan untuk menghemat energi.
Sensor infrared memiliki peran khusus dalam mendeteksi gerakan ikan di kolam. Ketika sensor mendeteksi gerakan ikan, motor servo akan diaktifkan untuk menaburkan pakan secara otomatis. Hal ini memastikan bahwa ikan mendapatkan pakan secara teratur dan sesuai kebutuhan, tanpa perlu campur tangan manusia secara langsung, yang meningkatkan efisiensi dalam pemeliharaan.
Sensor pH digunakan untuk memonitor dan mengontrol tingkat keasaman air dalam kolam. Tingkat pH yang optimal sangat penting untuk kesehatan ikan gurame. Sensor ini terus memantau pH air dan mengambil tindakan sesuai jika pH terlalu rendah (≤ 6.5) atau terlalu tinggi (≥ 7.5), dengan mengatur penambahan cairan basa atau asam menggunakan motor servo.
Keseluruhan sistem sensor dan aktuator ini bekerja secara terintegrasi dan otomatis untuk memastikan kondisi kolam budidaya gurame selalu optimal. Penggunaan teknologi otomatisasi ini tidak hanya meningkatkan efisiensi dalam pengelolaan kolam, tetapi juga memastikan kesejahteraan ikan dengan memonitor dan menyesuaikan kondisi lingkungan secara terus-menerus. Hal ini membuat budidaya gurame menjadi lebih mudah, terkontrol, dan produktif.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}